Gaussian Mixture Models
Base teórica
Nesse notebook, veremos a estimativa de densidade com o Modelo de Misturas de Gaussianas, o Gaussian Mixture Model. Iremos entender a matemática por trás desse modelo probabilístico, quais são seus parâmetros e como ele aprende.
Os Modelos de Misturas são usados para descrever uma distribuição \(p(x)\) por uma combinação de \(K\) distribuições de probabilidades
onde os componentes \(p_i\) são membros de uma família de distribuições básicas, como Gaussianas, Binomiais, Gammas, e \(\phi_i\) são os pesos da mistura.
No Modelo de Misturas de Gaussianas, utiliza-se a combinação de \(K\) distribuições Gaussianas \(\mathcal{N}(x|\space \mu_i, \space \sigma_i^2)\) de tal forma que
onde:
\(\mu\): média,
\(\sigma\): desvio padrão,
\(x\) é uma variável aleatória,
e definimos \(\theta := \{ \mu_i, \sigma_i, \phi_i \space : \space i=1, ..., K \}\) como a coleção de todos os parâmetros do modelo.
Essa combinação de distribuição de Gaussianas nos traz mais flexibilidade para modelar densidades complexas que uma única e simples distribuição Gaussiana.
O desafio agora é: como ajustar os parâmetros das Gaussianas (conjunto \(\theta\)) de forma a obter o melhor ajuste aos dados presentes? É claro que, se soubéssemos que componente gerou cada ponto dos dados, seria fácil recuperar as distribuições gaussianas correspondentes: poderíamos simplesmente selecionar todos os pontos de dados a partir de um dado componente e depois aplicar (em uma versão multivariada) a Equação: para ajustar os parâmetros de um gaussiano a um conjunto de dados. Por outro lado, se os parâmetros de cada componente fossem conhecidos, poderíamos, pelo menos em um sentido probabilístico, atribuir cada ponto de dados a um componente. O problema é que nao conhecemos nem as atribuições nem os parâmetros.
A ideia básica do EM é fingir que conhecemos os parâmetros do modelo e depois deduzir a probabilidade de cada ponto de dados pertencer a cada componente. Depois disso, readptamos os componentes aos dados, onde cada componente é ajustado ao conjunto de dados inteiro, com cada ponto ponderado pelo probabilidade de pertencer a esse componente. O processo iterage até a convergência. Essencialmnete, estamos «completando» os dados, deduzindo distribuições de probabilidade sobre as variáveis ocults - o com componente ao qual pertence cada ponto de dados - com base no modelo atual. Para o GMM, inicializamos arbitrariamente os paramentros do modelo de mistura e depois repitimos as duas etapas a seguir: 1. Etapa E: 2. Etapa M:
[ ]:
Implementação em código
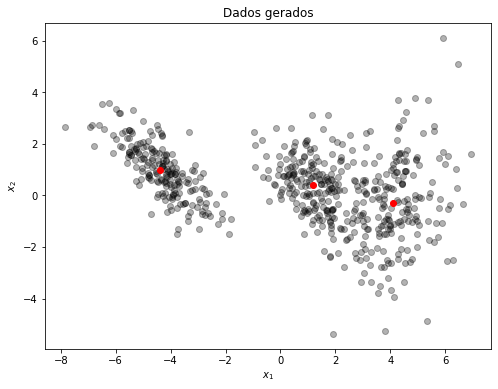
Nessa parte do notebook, a ideia é produzir dados artificialmente a partir de \(3\) distribuiçoes Gaussianas e treinar, com base no algoritmo de Maximação de Expectativa, EM Algorithm, um modelo de misturas de Gaussianas - GMM - que melhor se ajusta a esses dados.
[1]:
# Bibliotecas
import numpy as np
from scipy.stats import multivariate_normal
from scipy.linalg import norm
import matplotlib.pyplot as plt
plt.rcParams.update({'figure.max_open_warning': 0})
Criando dados artificias
[2]:
# Definindo vetor de médias e covariâncias
K = 3 # número de componentes
## Médias
m = np.zeros((3, 2))
m[0] = np.array([1.2, 0.4])
m[1] = np.array([-4.4, 1.0])
m[2] = np.array([4.1, -0.3])
## Covariâncias
S = np.zeros((3, 2, 2))
S[0] = np.array([[0.8, -0.4], [-0.4, 1.0]])
S[1] = np.array([[1.2, -0.8], [-0.8, 1.0]])
S[2] = np.array([[1.2, 0.6], [0.6, 3.0]])
[3]:
N_gaussian = 200 # número de pontos por gaussiana (componente da mistura)
N = N_gaussian*K # número total de pontos
x = []
y = []
for k in range(K):
x_temp, y_temp = np.random.multivariate_normal(m[k], S[k], N_gaussian).T
x = np.hstack([x, x_temp])
y = np.hstack([y, y_temp])
data = np.vstack([x, y])
# Plotando o dataset
plt.figure(figsize=(8, 6))
plt.title('Dados gerados')
plt.plot(x, y, 'ko', alpha=0.3) # dados gerados
plt.plot(m[:,0], m[:,1], 'or') # médias definidas anteriormente
plt.xlabel('$x_1$')
plt.ylabel('$x_2$')
plt.show()
Algoritmo EM
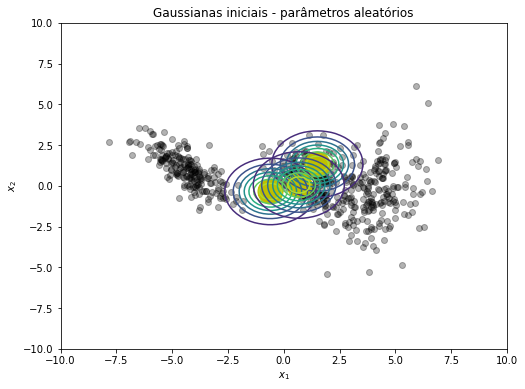
Inicializando parâmetros e visualizando as Gaussianas iniciais
[4]:
## Iniciando os parâmetros (médias, covariâncias e pesos) do EM arbitrariamente
medias = np.zeros((K, 2))
covs = np.zeros((K, 2, 2))
for k in range(K):
medias[k] = np.random.normal(size=(2,))
covs[k] = np.eye(2)
pesos = np.ones((K, 1))/K
[5]:
## Visualizando as Gaussianas criadas
plt.figure(figsize=(8, 6))
plt.plot(x, y, 'ko', alpha=0.3)
plt.plot(medias[:,0], medias[:,1], 'oy', markersize=25)
X, Y = np.meshgrid(np.linspace(-10, 10, 100), np.linspace(-10, 10, 100))
pos = np.dstack((X, Y))
for k in range(K):
rv = multivariate_normal(mean=medias[k,:],cov=covs[k,:,:])
plt.contour(X, Y, rv.pdf(pos), alpha=1.0, zorder=10)
plt.xlabel('$x_1$')
plt.ylabel('$x_2$')
plt.title('Gaussianas iniciais - parâmetros aleatórios')
plt.show()
[6]:
## Definindo primeiro valor de NLL
NLL = []
gmm_nll = 0
for k in range(K):
gmm_nll += pesos[k]*multivariate_normal.pdf(mean=medias[k,:], cov=covs[k,:,:], x=data.T)
NLL += [-np.sum(np.log(gmm_nll))]
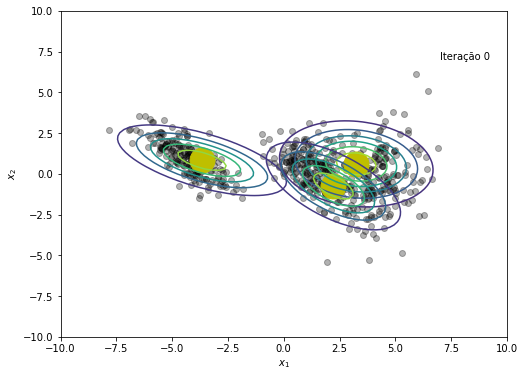
Maximação de Expectativa
Etapa E:
Etapa M:
onde definimos:
[7]:
n_interacoes = 100
[8]:
gama = np.zeros((K, N)) # Armazena as responsabilidades
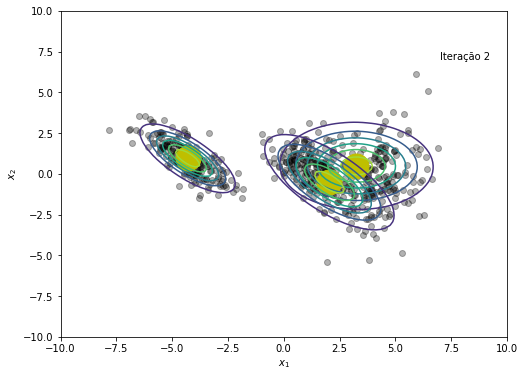
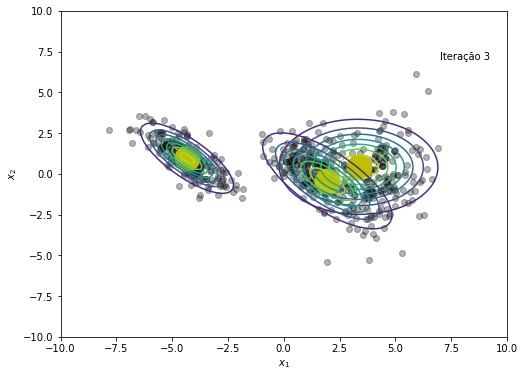
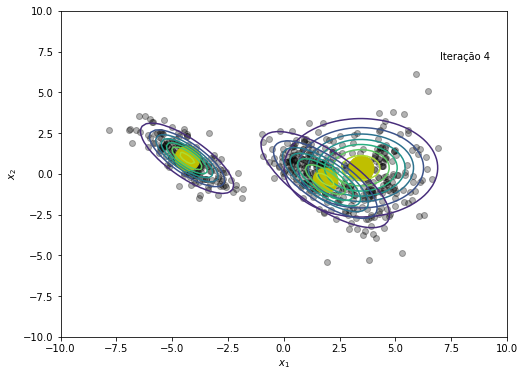
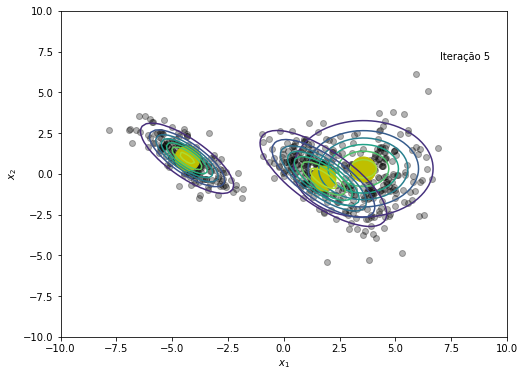
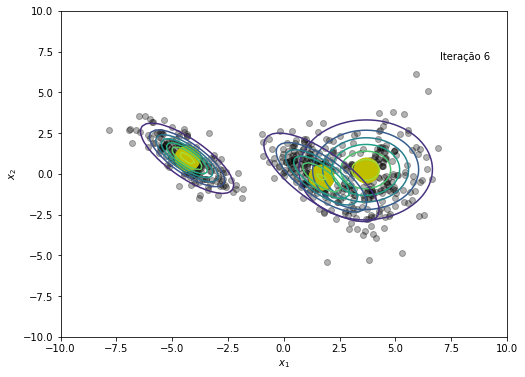
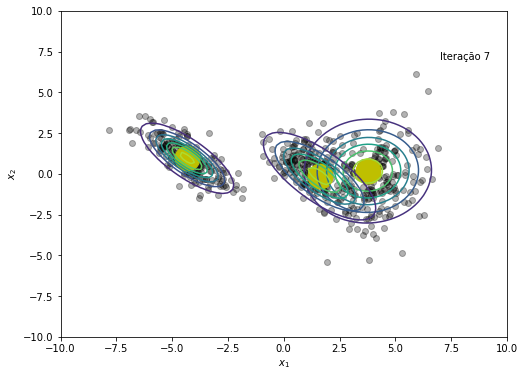
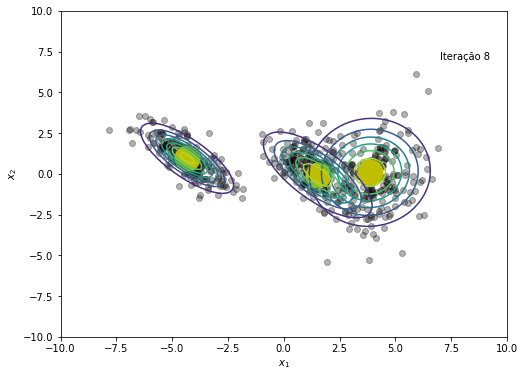
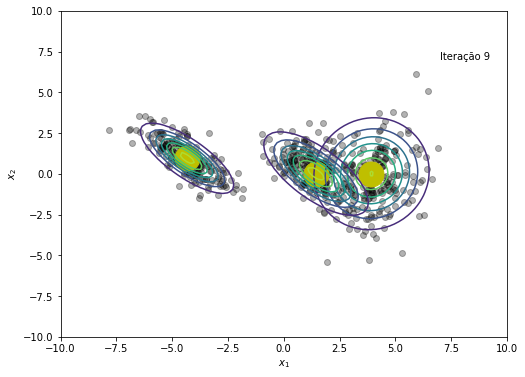
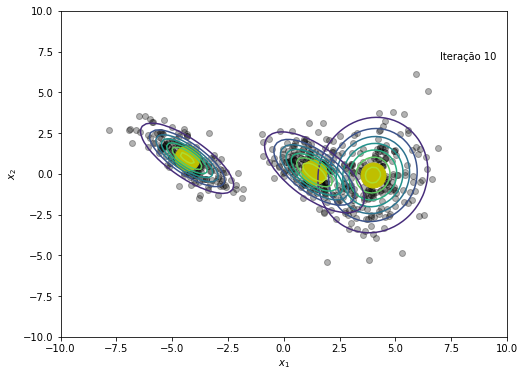
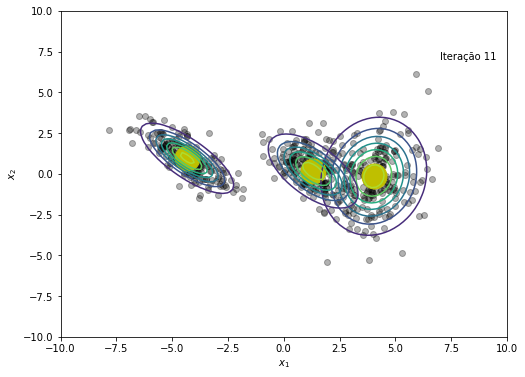
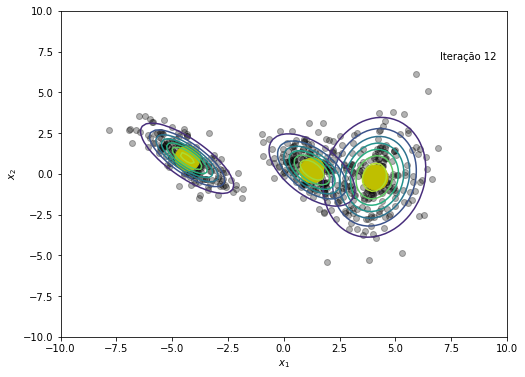
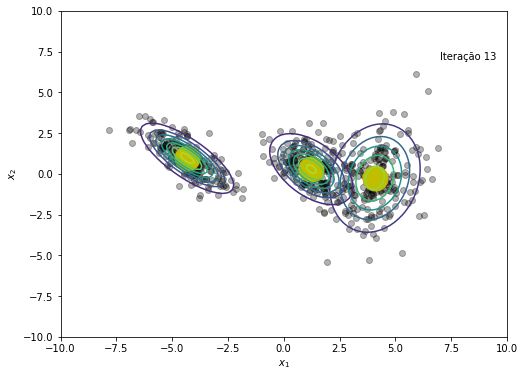
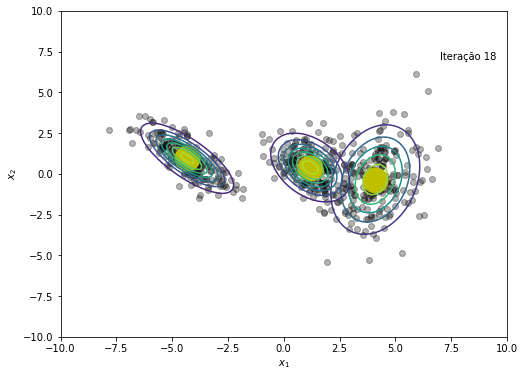
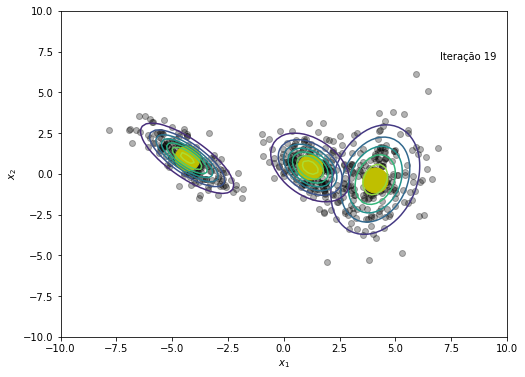
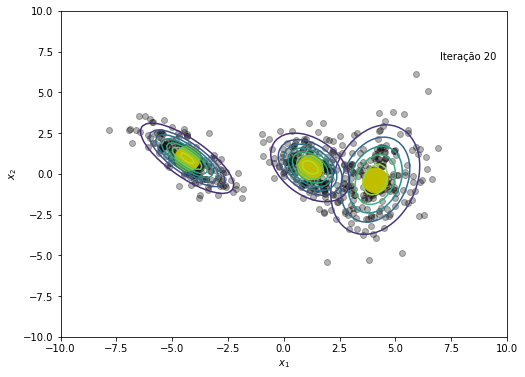
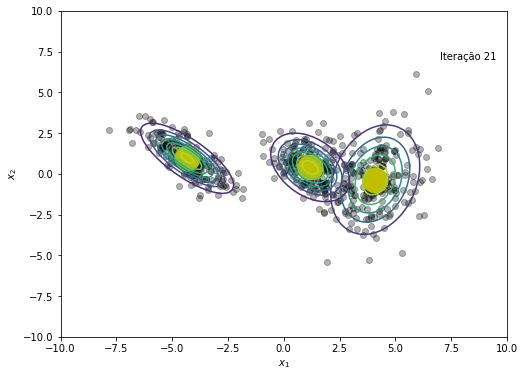
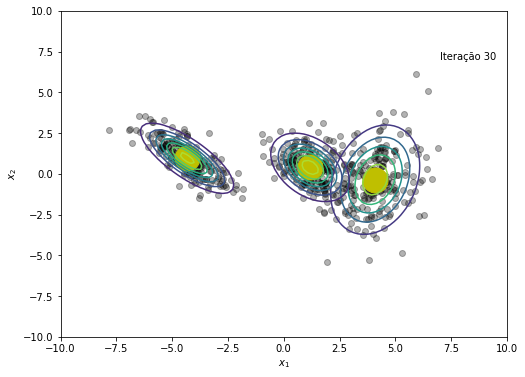
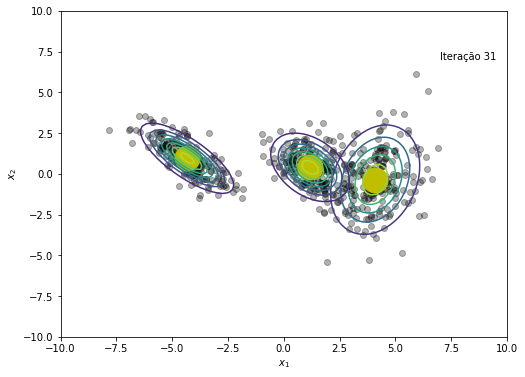
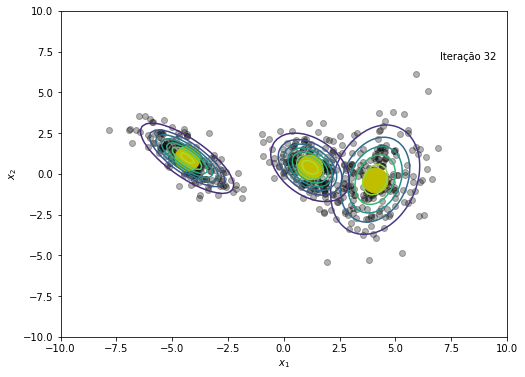
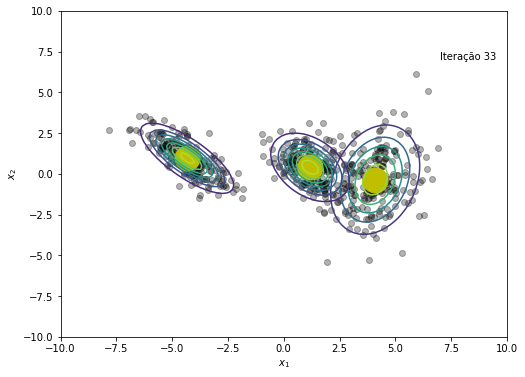
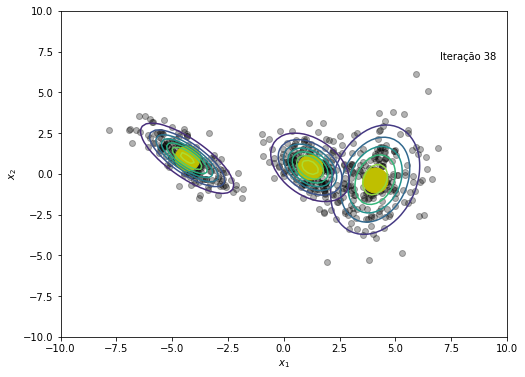
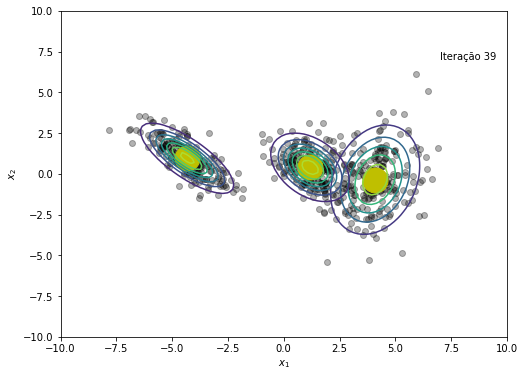
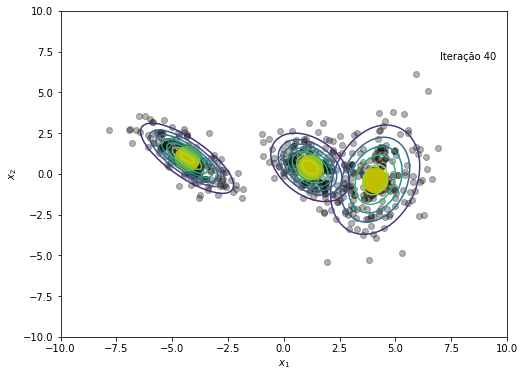
for em_iter in range(n_interacoes):
medias_antigo = medias.copy()
# Etapa E - Calcular as expectativas
for k in range(K):
gama[k] = pesos[k]*multivariate_normal.pdf(mean=medias[k,:], cov=covs[k,:,:], x=data.T)
gama /= np.sum(gama, axis=0)
# Etapa M - Atualizar parâmetros
N_k = np.sum(gama, axis=1)
for k in range(K):
# Atualizando médias
medias[k] = np.sum(gama[k]*data, axis=1)/N_k[k]
# Atualizando covariâncias
diff = data - medias[k:k+1].T
_temp = np.sqrt(gama[k:k+1])*diff
covs[k] = np.inner(_temp, _temp)/N_k[k]
# Atualizando pesos
pesos = N_k/N
# Calculando erro - vizinha logaritmica
gmm_nll = 0
for k in range(K):
gmm_nll += pesos[k]*multivariate_normal.pdf(mean=medias[k,:].ravel(), cov=covs[k,:,:], x=data.T)
NLL += [-np.sum(np.log(gmm_nll))]
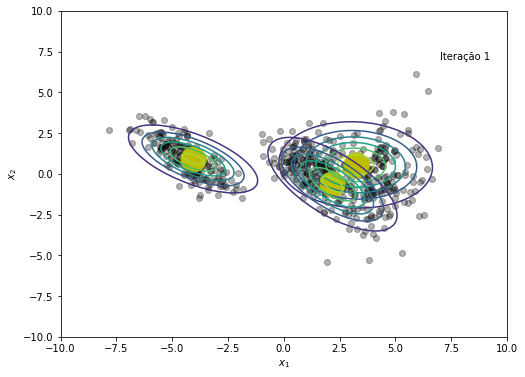
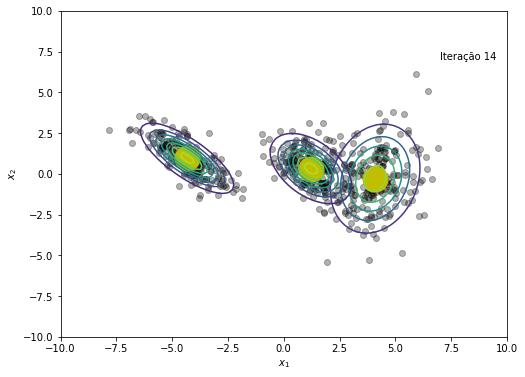
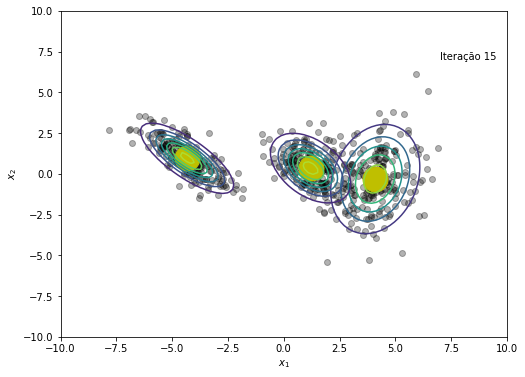
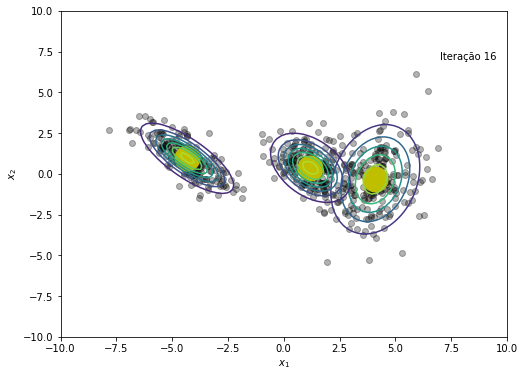
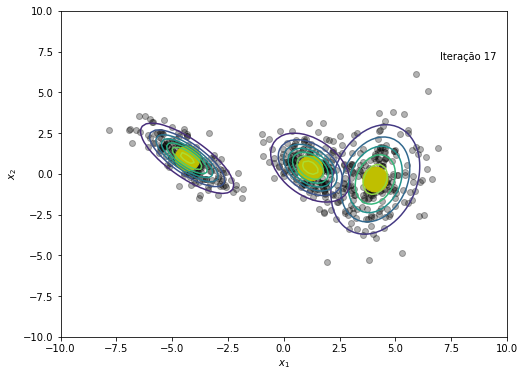
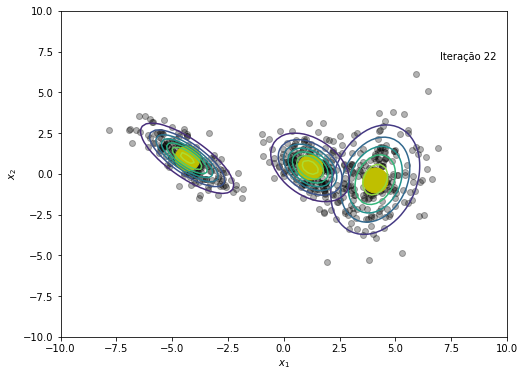
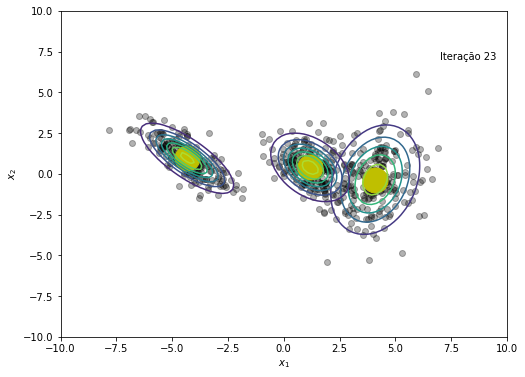
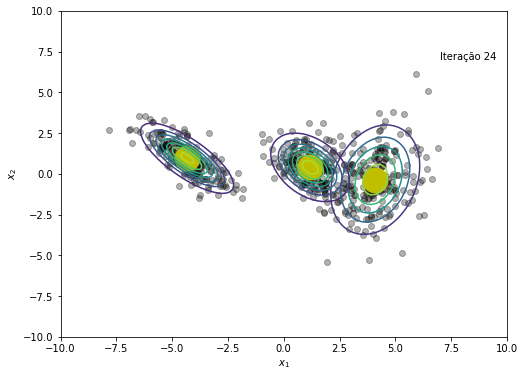
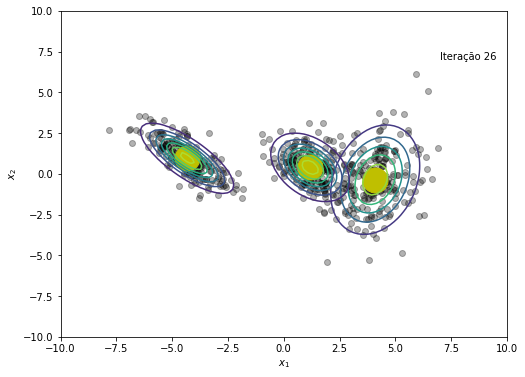
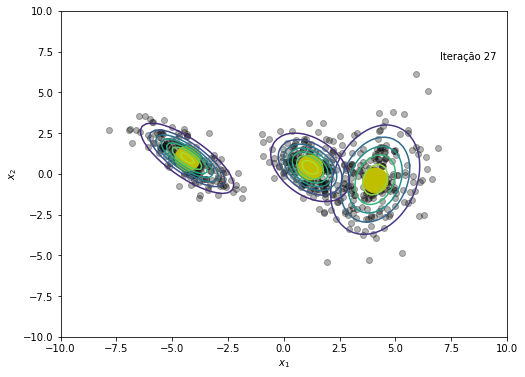
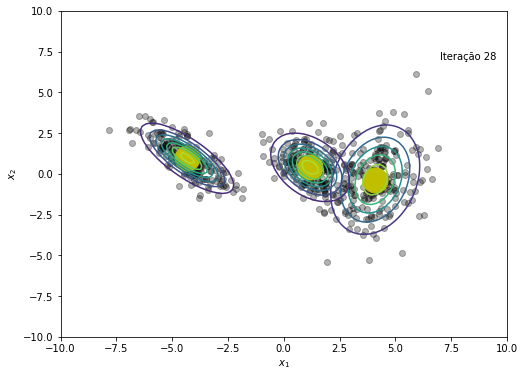
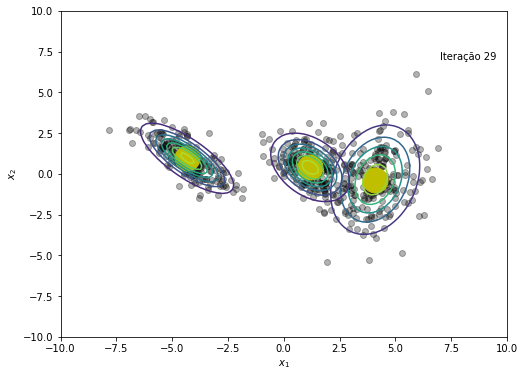
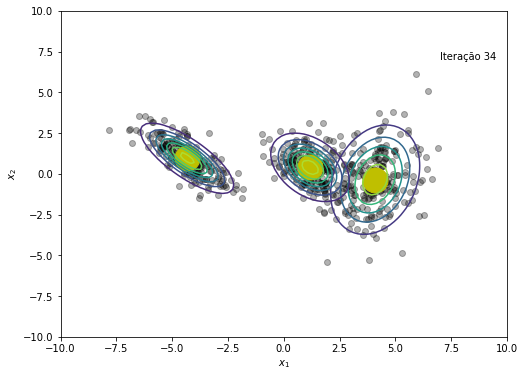
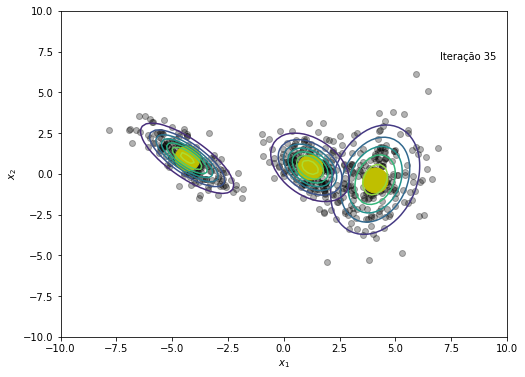
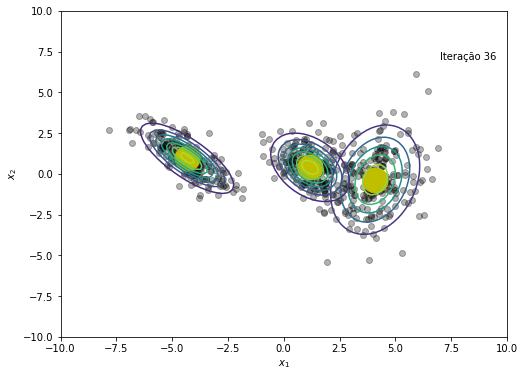
# Salvando cada iteração para criar gif no final
plt.figure(figsize=(8, 6))
plt.plot(x, y, 'ko', alpha=0.3)
plt.plot(medias[:,0], medias[:,1], 'oy', markersize=25)
for k in range(K):
rv = multivariate_normal(medias[k,:], cov=covs[k])
plt.contour(X, Y, rv.pdf(pos), alpha=1.0, zorder=10)
plt.xlabel('$x_1$')
plt.ylabel('$x_2$')
plt.text(x=7, y=7, s=f'Iteração {em_iter}')
plt.savefig(f'{em_iter}.png')
plt.show()
# Verificando convergência - erro = 1e-6
if norm(NLL[em_iter+1] - NLL[em_iter]) < 1e-6:
print(f'O modelo convergiu após a iteração {em_iter+1}')
break
# Plotando o Modelo de Mistura de Gaussianas final
plt.figure(figsize=(8, 6))
gmm = 0
for k in range(K):
mix = multivariate_normal(medias[k,:].ravel(), covs[k,:,:])
gmm += pesos[k]*mix.pdf(pos)
plt.plot(x, y, 'ko', alpha=0.3)
plt.contour(X, Y, gmm, alpha=1.0, zorder=10)
plt.show()
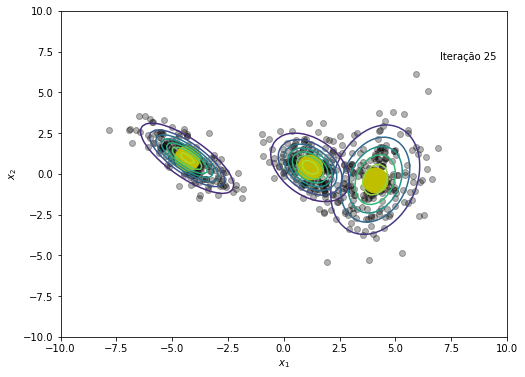
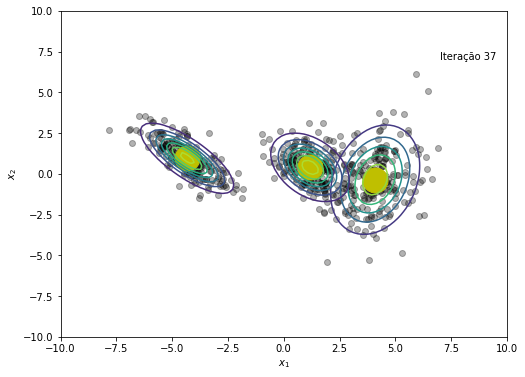
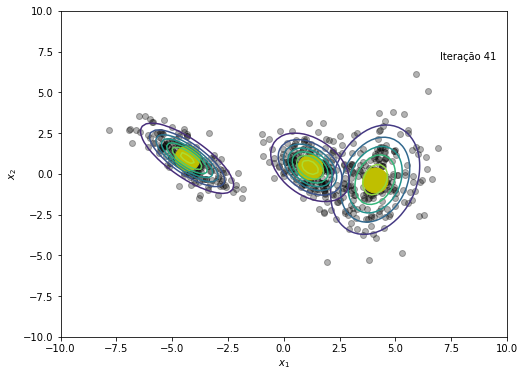
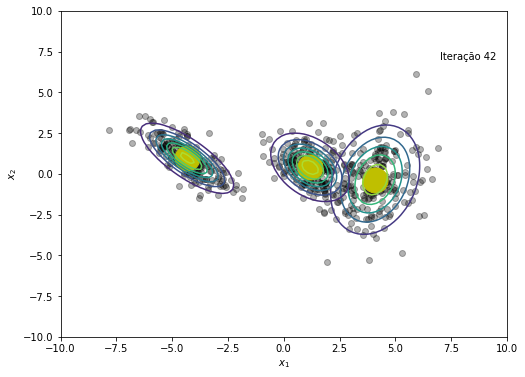
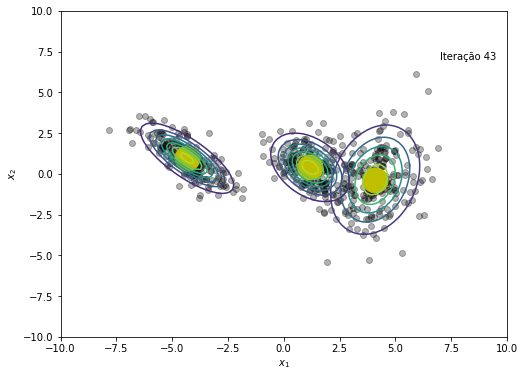
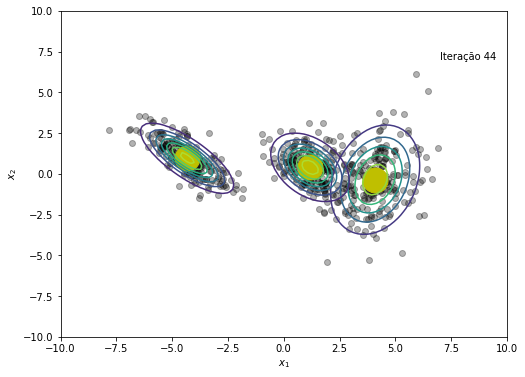
O modelo convergiu após a iteração 45

[10]:
em_iter = 45
[11]:
# Criando gif
import imageio
import os
filenames = []
for i in range(em_iter):
# create file name and append it to a list
filename = f'{i}.png'
filenames.append(filename)
# build gif
with imageio.get_writer('gaussians.gif', mode='I') as writer:
for filename in filenames:
image = imageio.imread(filename)
writer.append_data(image)
# Remove files
for filename in set(filenames):
os.remove(filename)

[ ]: